|
Tracking a
line
Something that is useful but not
difficult to implement is a line tracker. This allows
the 'bot to follow a line marked out on the
floor.
Traditional line trackers have a
black line on a white strip, or vice-versa, and a
photocell looks down upon the line. A change in the
photocell's reading signals that the positioning needs
to be adjusted.
Our implementation
The method used in
RickBot is much the same priniciple, however we
use two photocells which point down either side
of the marker line. This allows responses to be easier,
as we don't actually need to know in which direction we
move in order to correct our velocity. Instead, we can
use direct feedback from the left and right sensors to
know how to adjust movement.
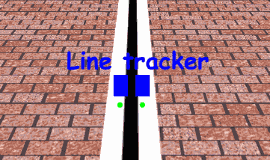
In the diagram above, the blue
squares represent the optical sensors. The green circles
represent roughly where the sensors 'see'.
A possible
extension (which is not currently supported) is the use
of a third sensor to detect the end of the
track by way of a special marker. Read more about
this
.
Data
signals
Because line track sensing is less
critical than bumping into things, the sensors do not
generate an interrupt. The state of the sensors must be
polled
regularly.
|
PA4
|
|
Left sensor |
|
PA5 |
|
Right
sensor |
The sensors will
connect to the interface board
by way of a "flying lead". This is to
facilitate operation when the line tracking is
not
in use - the flying lead may be disconnected and a special
feedback lead plugged in which will behave as if the sensors were connected and active,
see
below.
The diagram of how this connects
to the main board (Amélie) may be found in
Sensor
Circuitry
.
Line
colouring
The standard
line is a black strip with white edges. This
can be three pieces of coloured sticky tape side-by-side
or - given that many non-carpeted floor surfaces are a
light colour - it could be just lines of black
electrical tape on the floor.
This means, in
normal use, both sensors are "ON" when following a
line, and one will switch "OFF" to indicate crossing the
central black
marker.
There may be cases
where you would prefer dark/white/dark sensing. You
could run the RickBot outdoors with a white
stripe on a dark tarmac surface. In this case, the
sensors would normally be "OFF". There is an option to invert the tracker
response before working out what to do with it, so
no hardware modifications are
required.
Disabling the
tracking
In normal use, the line
tracker sensing provides fine-tuning of the drive
systems, to ensure that RickBot doesn't stray
from the line it is following. This could have
undesirable side-effects when there is no line to
follow, as variations in floor texture and colour could
cause all manner of odd side effects. For example,
imagine trying to track a line across a kitchen floor
laid out with those horrible white/black tiles in a
design sort-of Gingham. :-)
There is an option to disable the line
tracking. An alternative could be to unplug the sensors
and plug in a special plug where the two inputs are
connected to +5V by way
of a signal
diode. |