It is the 1739th of March 2020 (aka the 3rd of December 2024)
You are 18.119.120.59,
pleased to meet you!
mailto:blog-at-heyrick-dot-eu
PNJdrone DR-BEE
After last night's deplorable test, I got up early and tried out the drone in the daylight. Completely different story!
Here, before any more discussion, here's the edited (the good bits) video:
Remember - this isn't being recorded on an SD card installed in the drone. It is a WiFi connection (the drone as an "access point") to my phone, and an app on the phone that not only does the recording, but provides First Person View - I see exactly what the drone sees.
The original video is PAL, 720×576, 25fps; but YouTube doesn't support PAL so you'll see it scaled to 640×480 (480P). Meh.
To explain why the video lurches, consider this photo of the drone (taken from the user guide):
The only parts that move are the rotors. Speeding them up provides lift which makes the drone rise. Slowing them down causes less lift, so the drone will fall. Hovering is achieved when the desire to fall (gravity) is cancelled out by lift provided.
Now, if the speed of the rotors provides the up and down, how do we manage all of the other movements? For this, it is worth looking closely at the picture and noticing that the blades are not the same. The upper left and lower right blades are actually spin in a different direction to the upper right and lower left. So, just as a model helicopter with two blades spinning in opposite directions can turn itself by speeding up and slowing down blades to allow the rotational force to become unbalanced, the drone does the same thing. One pair of blades will speed up, one pair will slow down, and the end result will be spin.
The final part of the equation is movement. The blades push air down. That is all that they can do. So in order to move forward, the rear pair of blades will speed up (or the front pair slow down). This will throw off the centre of gravity so the drone will tilt forwards. Now the blades will be pushing air down and backwards, the end result being forward motion. The principle is identical for left/right/reverse motion.
The motion is sharp and exactly as wanted - when the control to move ceases, the drone stops without lingering drift. This is thanks to a six axis gyroscope that provides continual motion information to the internal processor, enabling it to transparently correct for unwanted drift. As each device is slightly different, there are trim controls built into the remote control unit, so if the drone has a tendency to drift in any given direction, this can be corrected by instructing the drone to compensate; though the gyro should be able to do this for itself.
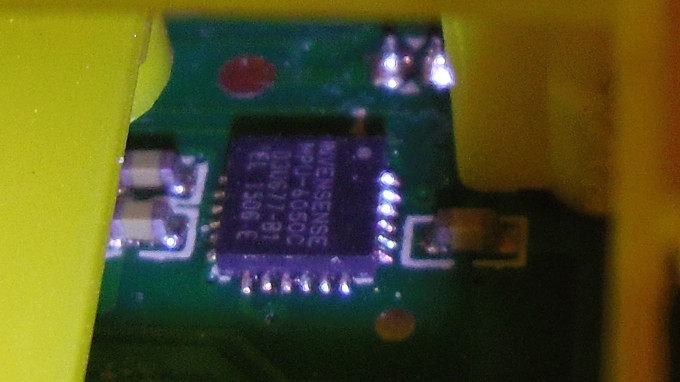
Looking through the battery access, one can make out the switching transistors that control the power to the motors, as well as an Invensense MPU-6050C six-axis gyro and accelerometer.
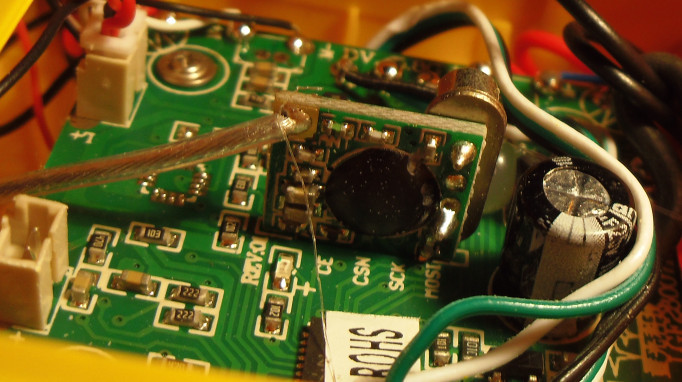
The smoky grey hood is basically clip-together, so this was fairly simple to remove to see the other side of the control board. Here it is. The thing you can see on the daughterboard is the RF receiver for the remote control. The main processor is likely to be the device lurking under the RoHS sticker; however since we're still in guarantee period, I'm not pulling the sticker off. ☺
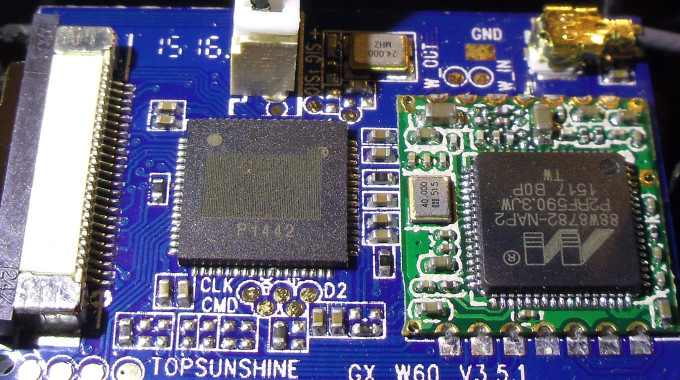
The camera module, on the other hand, is clip together. Not even a single screw, not even holding the tiny camera board in place. So, here's a photo showing a determined effort at hiding the IC used to provide the AP and image processing. I'm guessing that it is going to be some sort of ARM and DSP combination with some onboard memory. But, alas, hidden.
Your comments:
Please note that while I check this page every so often, I am not able to control what users write; therefore I disclaim all liability for unpleasant and/or infringing and/or defamatory material. Undesired content will be removed as soon as it is noticed. By leaving a comment, you agree not to post material that is illegal or in bad taste, and you should be aware that the time and your IP address are both recorded, should it be necessary to find out who you are. Oh, and don't bother trying to inline HTML. I'm not that stupid! ☺ ADDING COMMENTS DOES NOT WORK IF READING TRANSLATED VERSIONS.
You can now follow comment additions with the comment RSS feed. This is distinct from the b.log RSS feed, so you can subscribe to one or both as you wish.
Ronald, 3rd February 2016, 17:21
Not too bad for not having a go-pro style camera stabilizer. Or does it? Here in the US they are starting to regulate the heck out of these things. I wonder how it is over there?
This web page is licenced for your personal, private, non-commercial use only. No automated processing by advertising systems is permitted.
RIPA notice: No consent is given for interception of page transmission.