It is the 1727th of March 2020 (aka the 21st of November 2024)
You are 3.141.29.90,
pleased to meet you!
mailto:blog-at-heyrick-dot-eu
Washing machine motor
I looked at the photos that I took of the motor and drive belt of my new washing machine.
Motor, drum, and drive belt.
Now, this is all rule-of-thumb (fancy way of saying figures I plucked out of my arse) because I'm not tipping the machine over or taking it apart to measure... but from the photos, I am going to guess that the diameter of the drum wheel is something in the order of 35cm. For a regular male adult, that's probably about the width of your torso, and a little smaller than the inside of the drum itself.
The little nugget on the end of the motor that drives it looks pretty small. I'm going to guess it's about 2 cm diameter.
Now it's easy to convert diameter (that is to say, how big a circle is from one side to the other) into a circumference (how far around the outside of the circle) by simply multiplying by Pi (or π).
Doing this means that we can determine that around the drum wheel is 109.99 cm (let's just call that 110), and around the motor spindle is 6.28cm.
So if a dot on the drum wheel passes a metre ten to perform a complete rotation, then the belt moves a metre ten, which means the motor spindle needs to turn 17.51 times in order to turn the drum once.
You know, looking at those measurements makes me feel that my estimates are slightly off as the maths would be weird, and it's more likely that the actual ratio is more like 20:1, or for each revolution of the drum, the motor makes twenty.
This also means that if the drum is capable of spinning at 1000 rpm, the motor, in order to do that, will be spinning at 20,000 rpm. No wonder it sounds like it does, that's insanely fast.
But... we can dive a little deeper.
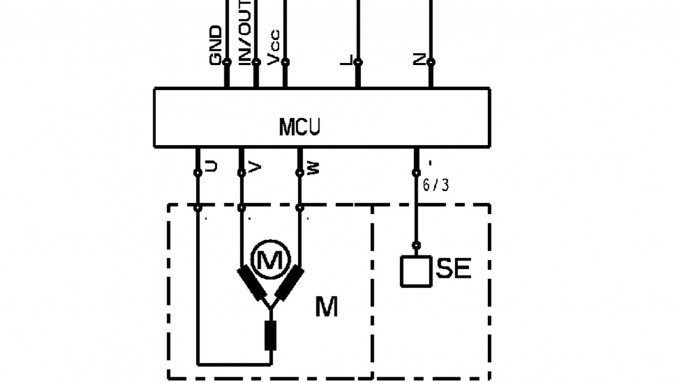
As I have mentioned, this washing machine has a brushless DC motor inside. I know this because of two things. The first is the amazing variety of available speeds, and the second is because the schematic of a similar machine describes the motor like this:
The motor on the schematic.
Older washing machines tended to have two or three speeds. My old machine had a slow speed (about 50 rpm) for washing and a faster speed (500 rpm) for the spin. The one we had in the UK had three speeds - the slow for washing, somewhere around 400-500 rpm for spin, and a special button for "Spin 800".
This, in an AC motor, is achieved by having actual separate sets of windings for each speed, and then choosing which set of windings are powered. If the magnetic field is, say, offset by thirty degrees around the motor, it'll turn at half the speed of one with the windings offset by sixty degrees.
Add into this the necessity of additional winding(s) to get the motor started and you can see it can get pretty complicated in a hurry. Plus, you're effectively locked at those predetermined speeds because the motor control is simply deciding whether or not you're dumping AC into the thing. If it's powered, it turns. Which bit is powered determines the speed. End of story.
Now we need a little bit of theory here. I did think about making a cute little drawing with DrawPlus but realised that since I'm no artist it would probably take me half a day. So I draw some really crappy diagrams in a couple of minutes instead.
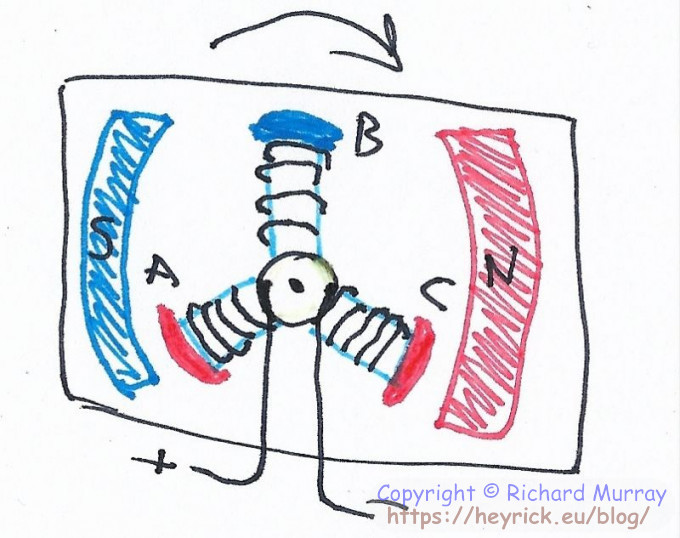
Here's the first one. It's a traditional DC motor like the sort you probably abused as a child.
A generic DC motor.
There will be at least three poles in a DC motor, as it helps to start the rotation. As you can see, the magnets are on the outside, and the coils are on the rotating part of the motor.
How you choose which coils are energised, and how, is called commutation, and it is achieved by having three contacts on the spindle (that, being coloured in fluorescent yellow didn't come out in the scan, useful!). Two litle metal 'feelers' (in a low power motor) or carbon 'brushes' (in a higher power motor) make contact with two of these contacts in order to determine how the coils are energised, which determines how the magnetic fields behave.
In the diagram, pole A is North which means it will be pulled towards the South magnet. Pole B is South which means it will be repelled from the South magnet and pulled towards the North one. And finally pole C has switched to North which means it will be repelled from the North magnet.
So, just whack in some DC and it'll spin. Reverse the polarity and it'll spin the other way. Speed is controlled by changing the voltage input (which, in turn, changes the strength of the magnetic fields). A little 3V motor will function on 12V (or higher), but... it won't like it.
Now to the brushless motor. These are much more suitable for big machinery (such as washing machines) because their speed is variable, the torque can be altered, and they should have a long service life due to having no mechanical parts in contact - no brushes to wear out.
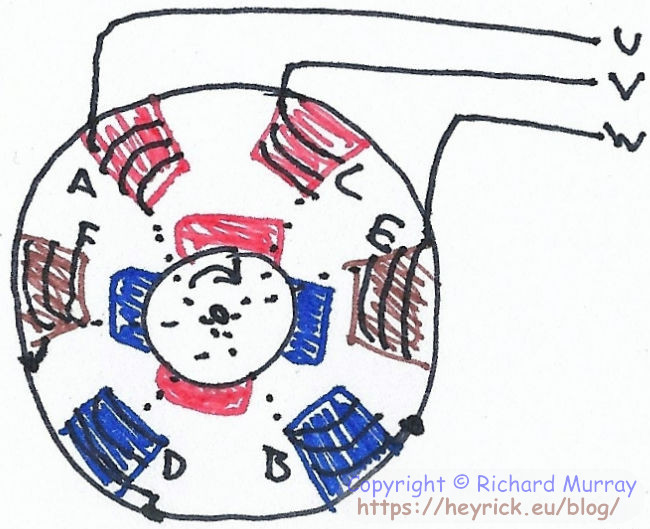
Here's my crappy diagram.
A generic brushless motor.
This is, effectively, a three phase motor that has quite a lot in common with the alternator in your car. And what you can tell right off is that this is a hell of a lot more complicated to control. You can't just dump power into it, that will only make it catch fire. ☺
So... we have three inputs labelled U, V, and W. This is traditional (it could easily be A, B, and C or L1, L2, and L3...) and is defined in the IEC 60034-8 standard that specifies that clockwise rotation will occur for positive power in the phase sequence U-V-W.
So, to the diagram above. A current is being passed into U which is energising pole A north, and at the same time energising pole B (wired in opposition) south. The power here will be decreasing.
At the same time, the power being put into V will be increasing, making a stronger magnetic field in pole C and it's opposite pole D.
At this point, there is no power at all in W, so poles E and F are unused.
While the inputs go to coils A, C, and E; the other coils B, D, and F are commoned. If you look, you'll see that each is connected to the outer circle. This means it is wired up as Y/Wye/Star - literally a diagram of the motor will have the common in the middle and then the coils which connect to the inputs, as shown in the diagram at the top. It's called Y/Wye because, well... go on, take a guess.
The alternative is a Delta wiring where U connects to V which in turn connects to W, and that connects back to U. It's called Delta because how it is wired up looks like the Greek letter Delta (Δ).
The delta method provides more speed, but it also requires more starting current. Y will give more torque for the same voltage and amps, though it will be slower for the same input. Because of the lesser requirements for start current, Y will perform much better at low speeds (like, say, the entire washing cycle!). Both types have their purposes.
As the spindle rotates, eventually V will reach it's peak and U will have diminished to nothing. This will be when W becomes energised, to carry on turning the rotor.
Later on, as W reaches peak and V diminishes, it's time once again to start to energise U, and here's the thing, it will need to be energised with reverse polarity, so that it continues with the same rotating magnetic field. If you energised it normally, you'd have north, north, north, south... and that wouldn't work.
So for half of the rotation the three lines are given normal polarity and for the other half reverse polarity, so we can imagine a moving "north" field and a moving "south" field opposite which effectively drag the rotor around.
Now, it is actually much more complicated than that. For starters, at fast rotational speeds, the motor works best if it is possible to sense where in the rotation the motor is, in order to provide power at the most appropriate moment.
Well, this is done in one of two ways. The first is by using Hall Effect sensors. A Hall Effect sensor is something that can detect metal by using inductance, so it doesn't need to touch or have any moving parts. The ABS system in your car will use these, along with a small wheel containing metal 'teeth' that it detects in order to know the exact speed that each wheel is rotating.
You can see one such sensor in the schematic at the top. Since there's only one, it is likely to be a safeguard in case the motor actually isn't turning, like the drum is blocked or something. If we were to be looking at using these sensors to detect the rotor position, there would typically be three of them arranged in such a way as to determine the state of each of the pairs of windings. It's a lot of wiring...
The second, and fairly common, way that reduces the complexity of the hardware is to use the unused pair of poles. If I provide power to a motor, it will turn. If I turn a motor, it will provide power. It's the same here, even though in the diagram W and poles E and F are unused and unpowered, the rotating magnetic fields will be causing a ripple on W. If the controller can read this, it can determine the position of the rotor. It only needs to read one set of coils as it knows the state of the other two, and can thus use it to provide minor corrections as necessary - much better than just firing the sequence and hoping for the best. That will, of course, work... but... uh... maybe not so great at those higher speeds! Keep reading to find out why.
Next, while things aren't overly complicated at low speeds (just energise two of the three inputs in turn with a 120 degree timing offset), things get helluva complex at high speeds.
For example, there is something known as the "winding time", which means the time it takes for a coil to become active (technically it's induction divided by resistance). It's pretty quick, about 300(ish) microseconds. However, if we're spinning at 20,000 rpm then that's 333.33' rotations per second, or 3000 microseconds per rotation. As you can imagine, the winding time taking a tenth of that (or 36° of rotation) is significant. If the motor has six coils (three pairs) they'll be 60° apart, so that 36° time? That's over half of the way through the anticipated travel across that coil.
And, yes, there's yet another wrinkle. This next wrinkle is that while a motor is still and motionless, applying power will cause a magnetic field to appear around the poles with your maximum induction being bang in the centre of the pole. However, when the motor is rotating, the magnetic field is actually bent to follow the direction of rotation, and the faster the rotation, the more the fields are bent. This means your maximum induction moves by an arbitrary amount determined by the rotational speed in addition to the winding time.
The problem is that while the amount of distortion of the field is determined by the speed, it is not linear. Twice the speed doesn't mean twice the offset. It is predictable, but it depends quite a bit upon the design of the motor itself, so what can be measured and applied to the motor built into my washing machine may be wrong if I took that out and put a different motor in there.
A really simple explanation for this field distortion is to say that the fixed magnets in the motor are interacting with the magnetic fields created by the coils. The neutral plane is an imaginary line drawn in opposition to the magnetic field. That is to say if you have North on the right and South on the left, the neutral plane goes from top to bottom, it's the line marking where there's no magnetic pull. As the motor spins, the faster it spins, the more the neutral plane is pushed forward in the direction of rotation. Here's another crappy drawing for your enjoyment...
Field distortion.
The above diagram is showing a brushed DC motor with the magnets on the outside as that was just easier to draw, but it equally applies to brushless. It's an interaction of the magnetic fields, not how they're arranged inside.
The way to deal with all of this is to energise the poles (perform the commutation) early, so that they're ready at just the right time (which is why it is necessary to be able to tell precisely where in the rotation the motor actually is).
And, of course, there's one final wrinkle (yup, I told you this stuff was complicated!). That being ripple. You can't just dump DC into coils offset, perhaps, sixty degrees and expect it to work right. It will be jerky. While that mightn't seem a big problem, at the higher speeds it will be, as having too much power at the wrong time will cause the motor to heat up. So the way this is overcome is by using PWM, or Pulse Width Modulation. It is not really possible to control the actual voltage being supplied, but if you can modulate it at a high frequency, say ten or twenty kilohertz, and then by just keep it off for half of the time will have the same effect as providing half of the expected voltage.
By careful modulation of the ratio between when there is and is not power present (say, on for three pulses and off for nine), it is possible to provide a reasonably well regulated "envelope" to the windings. It's still always at the nominal voltage, but it can be a little bit of power, then some more, then full whack, then tailing off, to just a trickle, and finally off. All it needs is careful timing and control of when the Power MOSFET is on and off.
I do not imagine the microcontroller inside a washing machine is actually that complicated. It will have a bunch of preset programmes and a pile of branches in the code for "if this then". If it's a small load, if the drum seems unbalanced, if the user wants extra rinses...
Where the complexity lies will be in the motor control. Sure, the basic arrangement is six Power MOSFETs in a half H-bridge design. That is to say, each input (pair of windings) will have two transistors. One to switch it positive, and one to switch it negative. Repeated three times for each input. And, as you have seen, capable of precise timings not just in the order of microseconds for when to activate the coils but also in the PWM for the amount of power to provide at any given moment.
Plus, reading back from the unused winding pair to determine the rotor position. Plus being able to apply corrections according to speed.
Phew!
Before I finish talking about motors, here's the wiring of the one inside the older machine (the one before the one before):
Old motor wiring.
There are three primary sets of windings. The normal washing speed, running at 180 rpm / 1.8A / 52W; the normal spinning speed at 1425 rpm / 2.4A / 240W; and finally the fast spin speed at 2800 rpm / 3.7A / 130W. Don't ask me why the currents don't match the watts, maybe it's the start-up current? I'm quoting the label on the side of them motor. It's an Italian SOLE 20571.513 (note, it seems many of the 20571's are two speed).
Remember I said all those windings would make it complicated inside? Well, here you go...
Old motor windings.
Oh, darn it!
Speaking of washing, I did some delicate/wool stuff today. But before I could wash one of the things (the pumpkin jumper), I had to fix a hole that the other washing machine so helpfully provided.
Note for my American readers: What you call a "jumper" appears to be something akin to a "pinafore dress" (which is not quite the same as either a "pinafore" or an "apron dress"). What we on this side of the ocean call a "jumper" is what you'd call a "sweater".
Essentially, "jumper", "sweater", "jersey", and "pullover" are all the same thing.
Confused? Well, if it has an open front and buttons up, it's a "cardigan". At least we can agree on that!
I found the two ends of the thread and tied them together to prevent further separation. Then, with some red thread, I went back and forth across the damaged area, and then back again. Hopefully this will hold everything in place.
How the repair looks like on the inside.
On the outside, slightly puckered but much better looking.
How the repair looks on the outside.
I then put it in the machine on the 30°C delicates cycle. There is a woolens cycle, but that only has 20°C and 40°C options. I felt 40 might have been a bit too much.
Interestingly, I noticed that I was not able to do "extra rinse" on this cycle, so I decided to fiddle with the controls to see when the tweaks actually work.
Programme
Rapid
Extra Rinse
Energy Saver
Cotton 95°
✓
60°
✓
✓
✓
40°
✓
✓
✓
Jeans 40°
✓
Hygiene 60°
✓
Synthetics 40°
✓
✓
✓
30°
✓
✓
✓
Delicates 40°
30°
Magic 40
✓
30 Chrono
Wool 40°
20°
Eco 40-60°
✓
20°
✓
Rinse and Spin
✓
Spin
-
-
-
Just empty
-
-
-
Here's the stuff hanging on the line. While the south of Europe is on fire, the bit in the middle is like being in a tumble drier. Warm enough, with constant wind and some rather strong gusts (the picnic table went walkies).
Washed stuff on the line.
That odd grey thing is known as a "Percko". That's actually the brand name. The thing itself is a "Medi Lyne". The idea is that it pushes forward in the small of your back and tugs the shoulders back to help make a better posture.
You see, as a child you're a Homo sapien. Upright, bouncy, loads of energy. As you progress, the weight of gravity and life takes its toll and you are more like Homo erectus, a little less upright and a lot less energy. Then as you get older still, you slump a little more to become Homo sod-off-I-want-to-stay-in-bed.
The Percko is designed to try to undo some of the weariness of all of those years of sarcastic cynicism. It won't give you energy, only sugar and caffeine can manage that. But by helping to undo some of the slumping, it might help you avoid the backache.
Speaking of cynicism... right in the foreground on the left of the photo. See the little square security tag that I forgot to cut off? That's because I didn't realise there was a security tag on the inside of a bobble hat that cost €4. Seriously, WTF.
Gardening stuff
Well. I have beans. And I have tomatoes. But I feel that the experiment was pretty much a failure.
The reason for this is that I have nine bean plants. Nine bean plants that are maybe a foot tall. I was expecting them to be... bigger.
Tomatoes and beans.
Of the nine, six of them were ones started in little pots out front. Of the 30-40 that I planted in the two rows, five came up. One keeled over dead shortly after and another was eaten by something.
This might explain why there's like a hundred or so in the box. Well, plenty for next year!
I took some time out of writing this to mow the driveway, as the weeds in the middle were clunking my bumpers.
Off on the mower.
Some weeds were whacked, and I'm pleased to have discovered this.
The Buddleia lives!
Mom planted that Buddleia (butterfly bush) in 1992 when she bought this place. It had grown to the tangled mess you can see in thirty years, until... in the summer of 2022, the extreme heat killed it.
But it didn't entirely kill it. As you can see from the four dashes of purple lurking in the middle of the picture, some part has survived.
I'll have to go through soon and cut away all the dead parts (most of it!) to tidy up and open up the parts that are still alive.
I also have a dinky little Buddleia in a pot that I got to replace it, that I can instead plant alongside.
Scribd
I found a possible copy of an older version of the IEEE regs for wiring colours (mentioned above) on Scribd. So I signed up with a disposable email address and went to download.
Nope. No can do. A pop-up on-screen saying "Upload 5 presentations, research papers, legal documents, or other documents to download for free.".
Well, that explains why Scribd is so full of rubbish, including a fair amount of websites printed to PDF. I did, once, come across a document that was basically a (broken) PDF of part of my Econet site. I didn't bother to fire off a takedown, it just wasn't worth the hassle.
I deleted my account.
Enchiladas
The other day I got myself some Tabasco. The regular type. I shook the bottle and splattered some drops onto a Pringle. And ate it.
And my head exploded.
Once I'd done that about ten or fifteen times, things settled down to an "it's a bit warm" rather than "holy crap aargh".
Yeah, I'm out of practice.
Problem is, while places like Buffalo Grill specialise in this sort of food (dressed up in some weird cowboy style with country musak playing), it doesn't seem possible to buy anything Tex-Mex in the supermarket except tinned chili con carne.
So, I guess I gotta roll my own.
I picked "Enchiladas". I don't remember the difference between them and tacos and burritos and so on. I mean, they're all wraps full of spicy stuff. I picked it because I kind of liked the name.
My dinner kit.
I'm extremely pleased to see that the sauce inside comes in two sachets. For this, I needed to get 500g of chicken breast (OMFG! €€€!) which is a heck of a lot for one meal. So it's nice that there are two sachets so I can do half today and the rest tomorrow.
I think, just 'cos, I might make some farfalle to go with these. Toss those in marge and a few drops of Tobasco to spice 'em up.
This, actually, sounds like a plan. So I'll upload this, feed the furry (pork and game mix with courgettes, good grief!), and make a start on dinner.
Your comments:
Please note that while I check this page every so often, I am not able to control what users write; therefore I disclaim all liability for unpleasant and/or infringing and/or defamatory material. Undesired content will be removed as soon as it is noticed. By leaving a comment, you agree not to post material that is illegal or in bad taste, and you should be aware that the time and your IP address are both recorded, should it be necessary to find out who you are. Oh, and don't bother trying to inline HTML. I'm not that stupid! ☺ ADDING COMMENTS DOES NOT WORK IF READING TRANSLATED VERSIONS.
You can now follow comment additions with the comment RSS feed. This is distinct from the b.log RSS feed, so you can subscribe to one or both as you wish.
David Pilling, 16th July 2023, 12:42
"There are two types of French bean – climbing and dwarf." Here in postage stamp garden land, the only way is up - climbing beans. Depends how you want to work, climbing requires something to climb up. Dwarf requires you to bend your back picking them, they're also more at predator height. Other common names "haricot vert", "green beans". Rebels may grow climbing beans without support when they become scrambling beans. Hooray for the buddleia.
Rick, 16th July 2023, 13:58
It's actually haricot blanc because I'm trying to make baked beans, but yeah, the rest applies.
Mom grew heritage beans and they grew up poles. Where I used to live as a child, a neighbour grew a lot of beans and they all grew up poles and wires. This is the first time I've ever come across a bean...bush.
Yup, I'm pleased for the buddleia.
J.G.Harston, 17th July 2023, 14:47
Oooo, bringing back floods of memories of college electrical engineering course 30 years ago. :)
I experimented by planting runner bens this year, but as usual everything except the potatoes has died off: https://pics.mdfs.net/2023/06/230610.htm
This web page is licenced for your personal, private, non-commercial use only. No automated processing by advertising systems is permitted.
RIPA notice: No consent is given for interception of page transmission.